ソフトハンドによる冷凍ハンバーグの搬送
- 参考価格
- お問い合わせください
製品・サービスに関する資料
得意な分野・カテゴリー
冷凍食品
製品説明・スペック紹介
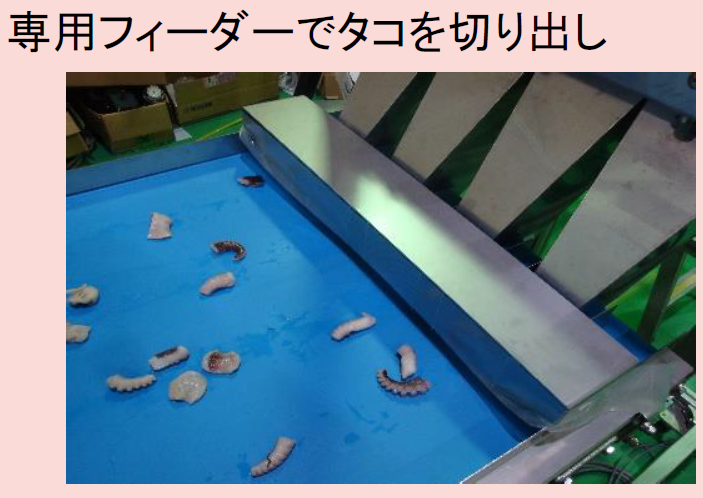
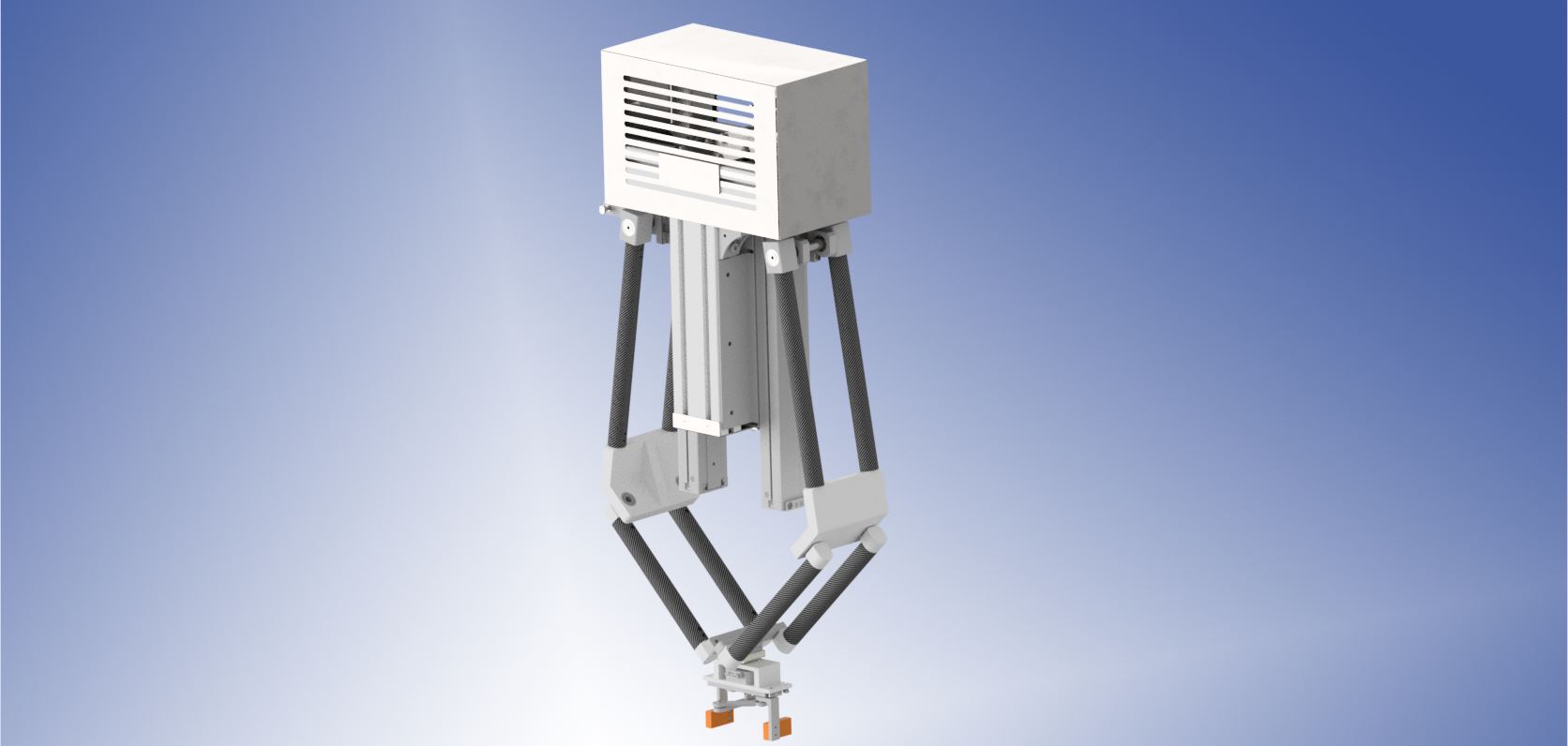
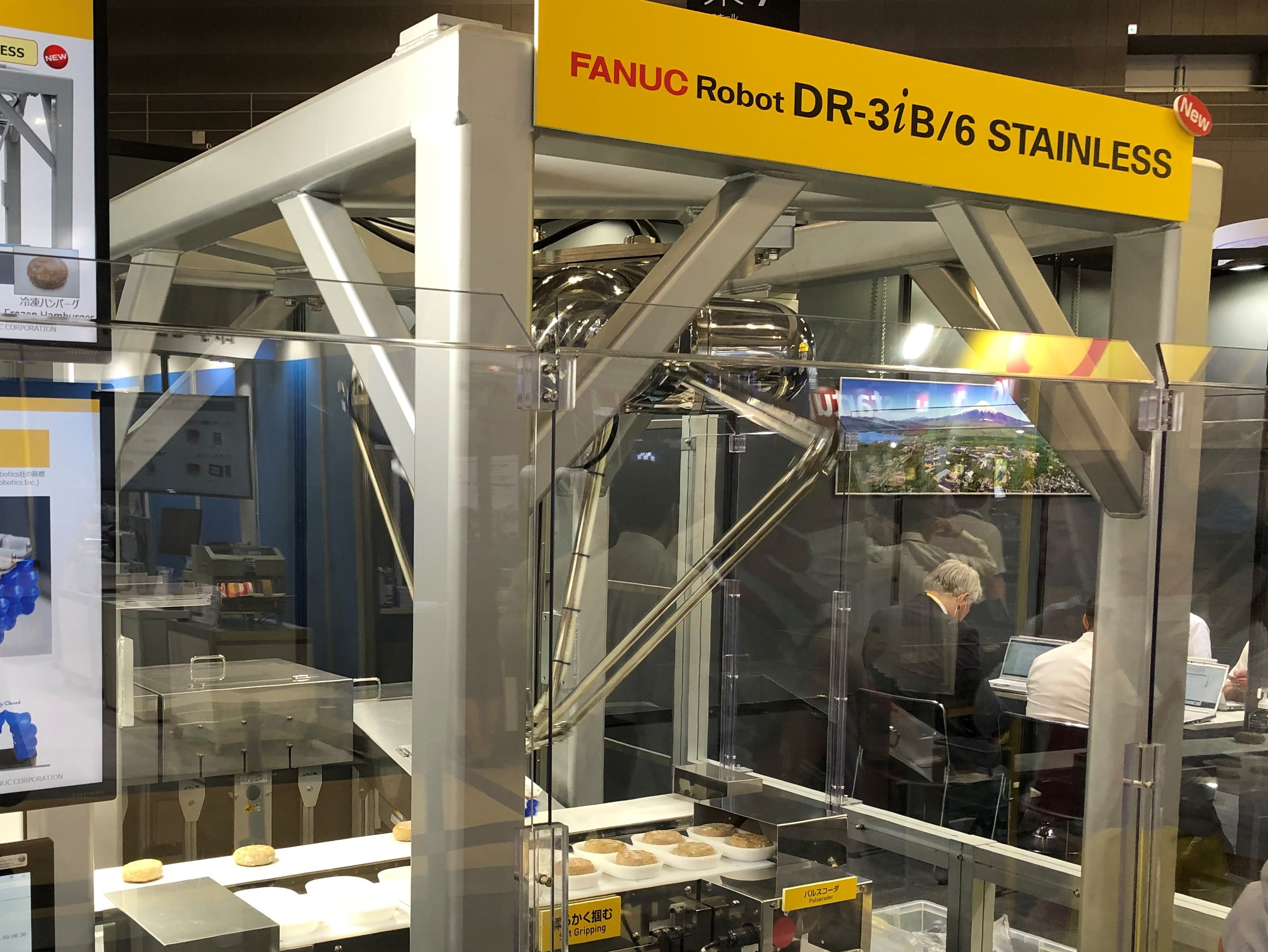
ステンレス製パラレルリンクロボットが、コンベアから供給される冷凍ハンバーグをビジュアルトラッキング機能によってピッキングします。
ソフトハンドmGrip が冷凍ハンバーグをしっかり把持し、トレイに高速に整列します。摺動部がなく、衛生的なmGrip は食品のハンドリングに最適です。
パラレルリンクロボットDR-3iBには、8kg可搬の耐薬品性に優れた塗装タイプと
一次食品にも対応可能なメッキタイプもラインナップしています。
取り扱い企業
- 企業名
- ファナック株式会社
- 所在地
- 〒401-0597 山梨県南都留郡忍野村忍草3580
- 電話
- 0555-84-5274
- Webサイト
- サービス提供エリア
-
- 北海道・東北
- 北海道、青森県、岩手県、宮城県、秋田県、山形県、福島県
- 関東
- 東京都、神奈川県、埼玉県、千葉県、茨城県、群馬県、栃木県
- 東海
- 愛知県、静岡県、岐阜県、三重県
- 北陸・甲信越
- 山梨県、新潟県、富山県、石川県、福井県、長野県
- 関西
- 大阪府、京都府、兵庫県、滋賀県、奈良県、和歌山県
- 中国・四国
- 鳥取県、島根県、岡山県、広島県、山口県、徳島県、香川県、愛媛県、高知県
- 九州・沖縄
- 福岡県、佐賀県、長崎県、熊本県、大分県、宮崎県、鹿児島県、沖縄県
製品詳細確認・カタログ無料ダウンロード可能